

教学资源
联系方式
联系人:辜渝傧
联系电话:13037102709
公司电话:027-87870986
公司地址:湖北省武汉市东湖新技术开发区金融港四路中原电子民品园10号楼

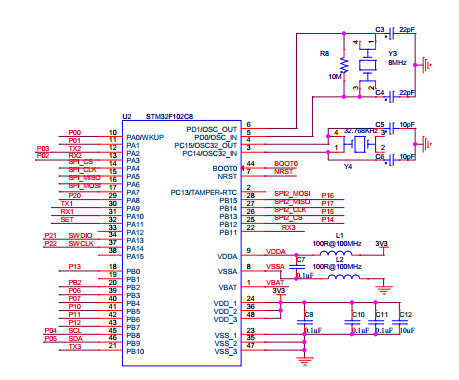
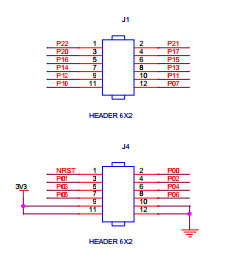
RFID实训|433M无线通信之电路搭建和程序实现
#include "hardware.h"
#include "uart1.h"
u8 Line1[16];
u8 Line2[16];
u8 TempBuf[50];
u8 StartStep=0;
u8 LcdDispEnable=0;
u8 SensorChangeFlag=0;
extern u8 flag_rev1_finish;
extern u8 flag_rev2_finish;
SensorData Sensor;
NodeData Node,NodeTemp;
SysParam Sys={3,0};
RfPacket_t BR433_TX,BR433_RX;
u8 Ser_num; //协调器编号
u8 Str2[16];
u8 Send_Buf[40];
u8 Uart1Data[USART1_MAX_RECV_LEN];
u8 Uart2Data[USART2_MAX_RECV_LEN];
u8 CheckResetMode(void);
void SetBR433Pack(void);
void GetSensorData(u8 id,u32 count);
void AppCmdDeal(void);
void SensorDetect(void);
void BR433_Setport(u8 ch);
void EXTI1_IRQHandler(void);
void Boot_A()
{
u32 i;
clear_screen();
disp_string_8x16_16x16(1,1,(const u8 *)"Button to Set!!");
for(i=0;i<6553600;i++)
{
IWDG_Feed();
if(KEY_Scan(0)==1)
{
clear_screen();
disp_string_8x16_16x16(1,1,(const u8 *)"Set the web site");
disp_string_8x16_16x16(3,1,(const u8 *)"A: 0");
for(i=0;i<6553600;i++)
{
IWDG_Feed();
if(KEY_Scan(0))
{
Ser_num=Ser_num+1;
if(Ser_num==10) Ser_num=0;
sprintf((char*)Str2,"%2d",Ser_num);
disp_string_8x16_16x16(3,18,(const u8 *)Str2);
}
}
memset((char*)&NodeTemp,0,sizeof(NodeData));
NodeTemp.server[0]=Ser_num;
STMFLASH_Write(FLASH_SAVE_ADDR,(u16*)&NodeTemp,sizeof(NodeData));
Ser_num=0;
}
}
}
u8 BOOT_B()
{
IWDG_Feed();
memset((char*)&NodeTemp,0,sizeof(NodeData));
STMFLASH_Read(FLASH_SAVE_ADDR,(u16*)&NodeTemp,sizeof(NodeData));
memset((char*)Send_Buf,0,sizeof(Send_Buf));
Send_Buf[0]='@';
Send_Buf[1]=NodeTemp.server[0];
Send_Buf[9]=NodeTemp.ip[0];
Send_Buf[11]=Sensor.Id;
Send_Buf[39]='$';
USART1->CR1 &= ~(1<<5);
IWDG_Feed();
uart1_send_bytes(40,Send_Buf);
USART1->CR1 |= 1<<5;
delay_ms(500);
if(flag_rev1_finish)
{
flag_rev1_finish=0;
if(!( USART1_RX_BUF[0]=='@' && USART1_RX_BUF[39]=='$'))
{
return 1;
}
if(USART1_RX_BUF[11]==Sensor.Id)
{
if(USART1_RX_BUF[13]=='S' && USART1_RX_BUF[14]=='E')
{
NodeTemp.server[0]=USART1_RX_BUF[1];
NodeTemp.ip[0]=USART1_RX_BUF[9];
STMFLASH_Write(FLASH_SAVE_ADDR,(u16*)&NodeTemp,sizeof(NodeData));
}
return 0;
}
}
delay_ms(100);
return 1;
}
void EXTI1_IRQHandler(void)
{
u8 temp=0;
delay_ms(5);
temp=1;
sprintf((char*)Str2,"Val:%d",temp);
disp_string_8x16_16x16(3,1,(const u8*)Str2);
BR433_TX.Pack.Sid[0] = 20;
BR433_TX.Pack.Sid[1] = ' ';
BR433_TX.Pack.Cmd[0] = 'S';
BR433_TX.Pack.Cmd[1] = 'N';
BR433_TX.Pack.Len = 1;
BR433_TX.Pack.Data[0] = temp;
uart1_send_bytes(40,BR433_TX.Buf);
EXTI->PR=1<<1; //清除LINE0上的中断标志位
}
int main(void)
{
u32 count=0;
u32 temp8=0;
//1.各项硬件初始化
Stm32_Clock_Init(9);
delay_init(72);
fg_BuzzerInit();
fg_KeyInit();
fg_OledInit();
fg_BuzzerOn(200);
IWDG_Init(4,1250);
fg_SensorIdInit();
clear_screen();
if(CheckResetMode()==1){ //软件复位
disp_string_8x16_16x16(1,1,(u8*)"User Reset!");
}else{
disp_string_8x16_16x16(1,1,(u8*)"Power on!");
}
#if(ESP8266_IS_STA==0)
Boot_A();
disp_string_8x16_16x16(1,1,(const u8*)"武汉唯众智创科技");
disp_string_8x16_16x16(3,1,(const u8*)"有限公司");
fg_SetKeyReset();
memset((char*)&NodeTemp,0,sizeof(NodeData));
STMFLASH_Read(FLASH_SAVE_ADDR,(u16*)&NodeTemp,sizeof(NodeData));
clear_screen();
disp_string_8x16_16x16(1,1,(const u8*)"A: 0");
sprintf((char*)Str2,"%2d",NodeTemp.server[0]);
disp_string_8x16_16x16(1,18,(const u8*)Str2);
uart1_init(72,115200);
uart2_init(36,9600);
while(1)
{
u8 i;
delay_ms(10);
sprintf((char*)Str2,"Received: %2d",temp8);
disp_string_8x16_16x16(3,1,(const u8*)Str2);
IWDG_Feed();
if(flag_rev1_finish )
{
IWDG_Feed();
temp8++;
if(USART1_RX_BUF[0]=='@'&&USART1_RX_BUF[39]=='$')
{
for(i=0;i<16;i++)
{
if(NodeTemp.ip[i]==USART1_RX_BUF[9])
{
break;
}
}
if(NodeTemp.server[0]==USART1_RX_BUF[1] && (i<15))
{
Send_Buf[0]='@';
Send_Buf[11]=USART1_RX_BUF[11];
Send_Buf[13]='O';
Send_Buf[14]='K';
Send_Buf[39]='$';
IWDG_Feed();
USART1->CR1 &= ~(1<<5);
uart1_send_bytes(40,Send_Buf);
}
else
{
for(i=0;i<16;i++)
{
if(NodeTemp.ip[i]==0)
{
break;
}
}
NodeTemp.ip[i]=i*3+USART1_RX_BUF[11]+13;
Send_Buf[0]='@';
Send_Buf[11]=USART1_RX_BUF[11];
Send_Buf[13]='S';
Send_Buf[14]='E';
Send_Buf[1]=NodeTemp.server[0];
Send_Buf[9]=NodeTemp.ip[i];
Send_Buf[39]='$';
STMFLASH_Write(FLASH_SAVE_ADDR,(u16*)&NodeTemp,sizeof(NodeData));
IWDG_Feed();
USART1->CR1 &= ~(1<<5);
uart1_send_bytes(40,Send_Buf);
}
}
else if(USART1_RX_BUF[0]=='#' && USART1_RX_BUF[39]=='$' && USART1_RX_BUF[1]==NodeTemp.server[0])
{
u2_send_data(USART1_RX_BUF,40);
}
USART1->CR1 |= 1<<5;
flag_rev1_finish=0;
}
if(flag_rev2_finish)
{
uart1_send_bytes(40,USART2_RX_BUF);
flag_rev2_finish=0;
}
}
#else
uart1_init(72,115200);
clear_screen();
disp_string_8x16_16x16(1,1,(const u8*)"武汉唯众智创科技");
disp_string_8x16_16x16(3,1,(const u8*)"有限公司");
fg_SetKeyReset();
IWDG_Feed();
Sensor.Id = fg_GetSensorId();
clear_screen();
sprintf((char*)Str2,"%2d: %2d: SID:%2d",NodeTemp.server[0],NodeTemp.ip[0],Sensor.Id);
disp_string_8x16_16x16(1,1,(const u8*)Str2);
SetBR433Pack();
fg_SensorDataInit(Sensor.Id);
if(!(Sensor.Id==S2_YYSB || Sensor.Id==S15_YYBF))
{
fg_Timer3Init(9999,7199);//1s触发一次
}
if(Sensor.Id==S20_SYJC)
{
RCC->APB2ENR|=1<<2;
GPIOA->CRL&=0XFFFFFF0F;
GPIOA->CRL|=0X00000080;
Ex_NVIC_Config(GPIO_A,1,RTIR);
MY_NVIC_Init(2,2,EXTI1_IRQn,2);
}
while(1)
{
count++;
GetSensorData(Sensor.Id,count);
IWDG_Feed();
if(flag_rev1_finish)
{
if(USART1_RX_BUF[0]=='#'&&USART1_RX_BUF[39]=='$'&&USART1_RX_BUF[11]==Sensor.Id)
{
BR433_Setport(Sensor.Id);
}
flag_rev1_finish=0;
}
}
#endif
}
void BR433_Setport(u8 ch)
{
switch(ch)
{
case S1_JDQ:
if(USART1_RX_BUF[13]==0)
{
PAout(1)=0;
}
else PAout(1)=1;
break;
default:
break;
}
}
void SensorDetect(void)
{
if(SensorChangeFlag == 1){
SensorChangeFlag = 0;
delay_ms(500);
if(SensorChangeFlag == 0){
Sensor.Id = fg_FreshSensor(Sensor.Id);
BR433_TX.Pack.Sid[0] = Sensor.Id;
}
}
}
void GetSensorData(u8 id,u32 count)
{
u8* ptr=NULL;
u8 temp8=0;
u16 delay=12000;
SetBR433Pack();
switch(id){
case S0_NULL:
sprintf((char*)Line2,"No sensor!");
break;
case S1_JDQ:
Sensor.Ivalue = PAin(0);
Sensor.Ovalue = PAout(1);
break;
case S2_YYSB:
sprintf((char*)Line2,"YYSB");
break;
case S10_WNHW:
temp8 = uart2_recv(2);
if(temp8>0){
}
sprintf((char*)Line2,"WNHW");
break;
case S11_CK:
break;
case S20_SYJC:
temp8=0;
break;
case S18_WSD:
delay = 100;
if(count%delay==0){
DHT11(&Sensor.Tvalue,&Sensor.Hvalue);
}
break;
case S19_HWSF:
break;
case S4_YD:
case S8_KQZL:
case S17_RTHW:
case S25_YW:
case S26_GM:
ptr = fg_GetAoutDout();
Sensor.Dvalue = ptr[0];
Sensor.Avalue = ptr[2];
break;
default:
sprintf((char*)Line2,"Untreated!");
break;
}
if(count%delay==0){
}
}
void TIM3_IRQHandler(void)
{
u8* ptr=NULL;
if(TIM3->SR&0X01)
{
Sys.counter++;
if(Sys.counter%UPLOAD_TIME==0){
SetBR433Pack();
BR433_TX.Pack.Sid[0]=Sensor.Id;
BR433_TX.Pack.Sid[1] = ' ';
BR433_TX.Pack.Cmd[0] = 'S';
BR433_TX.Pack.Cmd[1] = 'N';
switch(Sensor.Id){
case S1_JDQ:
BR433_TX.Pack.Len = 2;
BR433_TX.Pack.Data[0] = PAin(0);
BR433_TX.Pack.Data[1] = PAout(1);
sprintf((char*)Line2,"In:%d Out:%d",Sensor.Ivalue,Sensor.Ovalue);
break;
case S18_WSD:
BR433_TX.Pack.Len = 2;
BR433_TX.Pack.Data[0] = Sensor.Tvalue;
BR433_TX.Pack.Data[1] = Sensor.Hvalue;
sprintf((char*)Line2,"Tem:%2d Hum:%2d",Sensor.Tvalue,Sensor.Hvalue);
break;
case S19_HWSF:
break;
case S3_HE:
break;
case S20_SYJC:
BR433_TX.Pack.Len = 1;
BR433_TX.Pack.Data[0] = PAin(1);
sprintf((char*)Line2,"Val:%d ",BR433_TX.Pack.Data[0]);
break;
case S14_485:
break;
case S4_YD:
case S8_KQZL:
case S17_RTHW:
case S25_YW:
case S26_GM:
ptr = fg_GetAoutDout();
BR433_TX.Pack.Len = 3;
BR433_TX.Pack.Data[0] = ptr[0];
BR433_TX.Pack.Data[1] = ptr[1];
BR433_TX.Pack.Data[2] = ptr[2];
sprintf((char*)Line2,"Sig:%d Val:%d",ptr[0],ptr[2]);
break;
default:
break;
}
uart1_send_bytes(40,BR433_TX.Buf);
oled_clear_vertical(2);
disp_string_8x16_16x16(3,1,Line2);
}
TIM3->SR&=~(1<<0);
}
}
void SetBR433Pack(void)
{
BR433_TX.Pack.Head = '#';
BR433_TX.Pack.Cmd[0] = 'S';
BR433_TX.Pack.Cmd[1] = 'N';
BR433_TX.Pack.Laddr[0] = NodeTemp.server[0];
BR433_TX.Pack.Saddr[0] = NodeTemp.ip[0];
BR433_TX.Pack.Tail = '$';
}
u8 CheckResetMode(void)
{
u8 temp8 = 0;
if(RCC->CSR & 0x10000000)
{//????
temp8 = 1;
}
RCC->CSR |= 0x01000000;//RCC->CSR ?????
return temp8;
}
