

教学资源
联系方式
联系人:辜渝傧
联系电话:13037102709
公司电话:027-87870986
公司地址:湖北省武汉市东湖新技术开发区金融港四路中原电子民品园10号楼

无线传感网络实训|实验2.8 中断唤醒睡眠实验
1.实验目的
1)、为什么要睡眠? Zigbee 的特点就是远距离低功耗的无线传输设备,节点模块闲时可以进入睡眠模式,在需要传输数据时候进行唤醒,能进一步节省电量。2)、掌握几种系统电源模式的基本设置及切换。系统电源有以下几种管理模式:全功能模式,高频晶振(16M 或者 32M )和低频晶振(32.768K RCOSC/XOSC )全部工作, 数字处理模块正常工作。
PM1 : 高频晶振(16M 或者 32M )关闭,低频晶振(32.768K RCOSC/XOSC )工作,数字核心模块正常工作。PM2 :低频晶振(32.768K RCOSC/XOSC )工作, 数字核心模块关闭,系统通过 RESET,外部中断或者睡眠计数器溢出唤醒。
PM3 : 晶振全部关闭,数字处理核心模块关闭,系统只能通过 RESET 或外部中断唤醒。此模式下功耗最低。
3)、将睡眠模式下的 CC2530 通过定时器唤醒,观察 LED 闪烁现象
2.实验设备
硬件:PC机1台、ZIGBEE节点板1套(底板、核心板、仿真器、USB 线)软件:2000/XP/win7 系统,IAR 8.10 集成开发环境
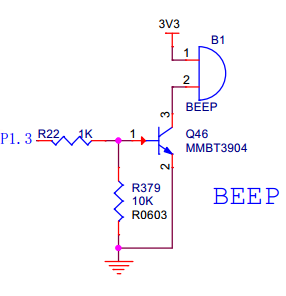
3.实验相关电路图
4.实验相关寄存器
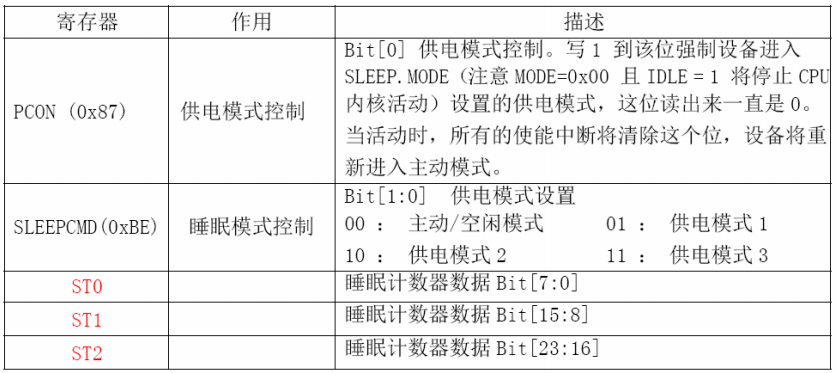
睡眠定时器用于设置系统进入和退出低功耗睡眠模式之间的周期。还用于当系统进入低功耗模式后,维持MAC 定时器(T2)的定时。
其特性如下: 长达24 位定时计数器,运行在32.768KHZ的工作频率。24 位的比较器具有中断和DMA 触发功能在PM2 低功耗模式下运行.按照表格寄存器的内容,相关寄存器配置如下:
SLEEPCMD |= mode; //设置系统睡眠模式mode 取值为0、1、2、3
PCON = 0x01; //进入睡眠模式,通过中断唤醒
PCON = 0x00; //通过中断唤醒系统
5.源码分析
| #include <ioCC2530.h> #define uint unsigned int #define uchar unsigned char #define DELAY 15000 #define BUZZER P1_3 //定义BUZZER为P13口控制 #define KEY P2_0 //定义KEY为P20口 void Delay(void); void SysPowerMode(uchar sel); /**************************************************************** 延时函数 ****************************************************************/ void Delay(void) { uint i; for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); for(i = 0;i<DELAY;i++); } /**************************************************************** 系统工作模式选择函数 * para1 0 1 2 3 * mode PM0 PM1 PM2 PM3 ****************************************************************/ void SysPowerMode(uchar mode) { uchar i,j; i = mode; if(mode<4) { SLEEPCMD &= 0xFC; SLEEPCMD |= i; //设置系统睡眠模式 for(j=0;j<4;j++); { PCON = 0x01; //进入睡眠模式 } } else { PCON = 0x00; //系统唤醒 } } /**************************************************************** LED 控制 IO 口初始化函数 ****************************************************************/ void Init_IO_AND_BUZZER(void) { P1DIR |= 0x08; //P13定义为输出 BUZZER = 0; P2DIR &= ~0x01; //P20定义为输入 KEY = 1; P2INP &= ~0X01; //配置P2.0口上拉下拉 P2IEN |= 0X01; //P2.0为中断模式 PICTL |= 0X08; //下降沿 IEN2 |= 0X02; P2IFG &= ~0x01; EA = 1; }; /**************************************************************** 主函数 ****************************************************************/ void main() { uchar count = 0; Init_IO_AND_BUZZER(); BUZZER = 1 ; //开蜂鸣器,系统工作指示 Delay(); //延时 while(1) { BUZZER = !BUZZER; count++; if(count >= 6) { count = 0; SysPowerMode(3); //3 次蜂鸣后进入睡眠状态 PM3 } Delay(); //延时函数无形参,只能通过改变系统时钟频率或 DEALY 的宏定义 //来改变小灯的闪烁频率 }; } /***************************************** 中断处理函数-系统唤醒 *****************************************/ #pragma vector = P2INT_VECTOR __interrupt void P2_ISR(void) { if(P2IFG>0) { P2IFG = 0; } P2IF = 0; SysPowerMode(4); } |
