

教学资源
联系方式
联系人:辜渝傧
联系电话:13037102709
公司电话:027-87870986
公司地址:湖北省武汉市东湖新技术开发区金融港四路中原电子民品园10号楼

无线传感网络实训|实验2.7 看门狗实验
1.实验目的
看门狗是在软件跑飞的情况下CPU自恢复的一个方式,当软件在选定的时间间隔内不能置位 看门狗定时器(WDT),WDT就复位系统。看门狗可用于电噪声,电源故障或静电放电等恶劣工作环境或高可靠性要求的环境。如果系统不需要应用到看门狗,则WDT可配置成间隔定时器,在选定时间间隔内产生中断。WDT的特性如下:4个可选择的时间间隔看门狗定时器模式下产生中 断请求时钟独立于系统时钟,WDT 包括一个15位定时/计数器,它的频率由 32.768KHz的晶振。2.实验设备
硬件:PC机1台、ZIGBEE节点板1套(底板、核心板、仿真器、USB 线)软件:2000/XP/win7 系统,IAR 8.10 集成开发环境
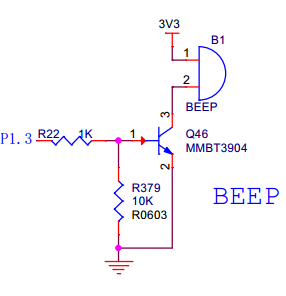
3.实验相关电路图
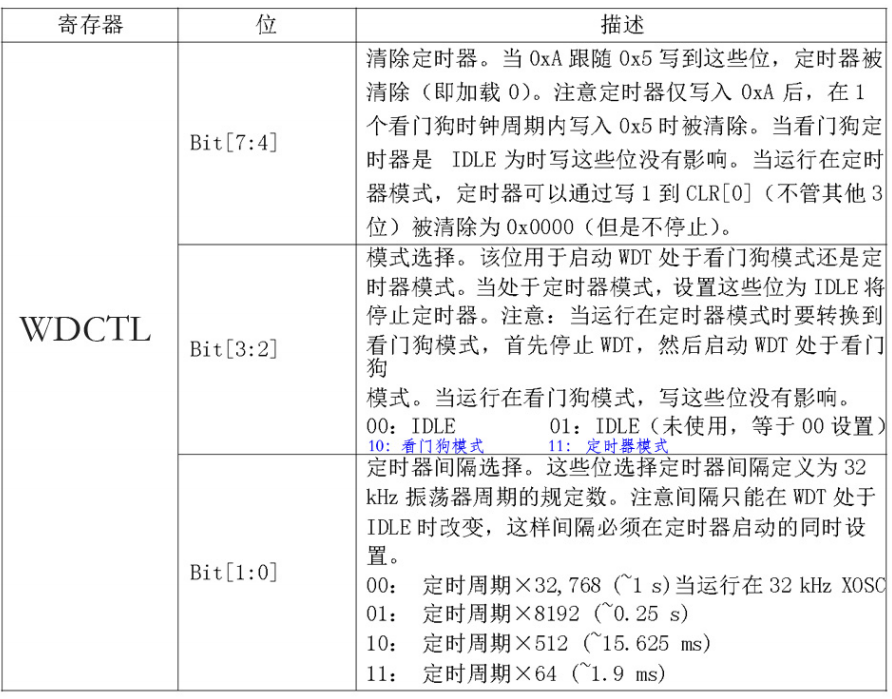
4.实验相关寄存器
5.源码分析
| # include <ioCC2530.h> #define uint unsigned int #define BUZZER P1_3 //定义BUZZER为P13口控制 void Initial(void) { P1DIR |= 0x08; //P13定义为输出 BUZZER = 0; BUZZER = 1; BUZZER = 1; } void Init_Watchdog(void) { WDCTL = 0x00; //时间间隔一秒,看门狗模式 WDCTL |= 0x08; //启动看门狗 } void SET_MAIN_CLOCK(source) { if(source) { CLKCONCMD |= 0x40; /*RC*/ while(!(CLKCONSTA &0X40)); /*待稳*/ } else { CLKCONCMD &= ~0x47; /*晶振*/ while((CLKCONSTA &0X40)); /*待稳*/ } } void FeetDog(void) { WDCTL = 0xa0; WDCTL = 0x50; } void Delay(uint n) { uint i; for(i=0;i<n;i++); for(i=0;i<n;i++); for(i=0;i<n;i++); for(i=0;i<n;i++); for(i=0;i<n;i++); } void main(void) { SET_MAIN_CLOCK(0) ; Initial(); Init_Watchdog(); Delay(1000); BUZZER=0; Delay(1000); while(1) { //FeetDog(); } //喂狗指令(加入后系统不复位,蜂鸣器不再蜂鸣) } |
